Jaká schémata zapojení může mít třífázový elektromotor?
Proč jsou třífázové elektromotory připojeny k napětí odlišným připojením jejich vinutí? Někdy slýcháme v rozhovorech mezi elektrikáři o spojení hvězda a trojúhelník. Je možné se obejít bez těchto různých schémat elektrického zapojení?
Ukazuje se, že můžete motory zapojit do hvězdy, nebo spíše do „hvězdového okruhu“, ale v tomto případě bude trvat déle, než motor sám zrychlí a bude vyrábět méně energie, nebo jej můžete zapnout obvod „delta“ – motor při zapnutí (zrychlení) spotřebovává více energie, dochází k náběhu proudu a klesá napětí v síti, proto jsou tyto spínací obvody vzájemně kombinovány.
Schémata zapojení elektromotoru. Hvězda – trojúhelník
Používají se hlavní způsoby připojení třífázových elektromotorů k síti: „zapojení do hvězdy“ a „zapojení do trojúhelníku“.
Při spojení třífázového elektromotoru s hvězdou jsou konce jeho statorových vinutí spojeny dohromady, spojení nastane v jednom bodě a na začátek vinutí je přivedeno třífázové napětí (obrázek 1).
Při zapojení třífázového elektromotoru pomocí schématu zapojení „trojúhelníku“ jsou statorová vinutí elektromotoru zapojena do série tak, že konec jednoho vinutí je spojen se začátkem dalšího a tak dále (obr. 2).
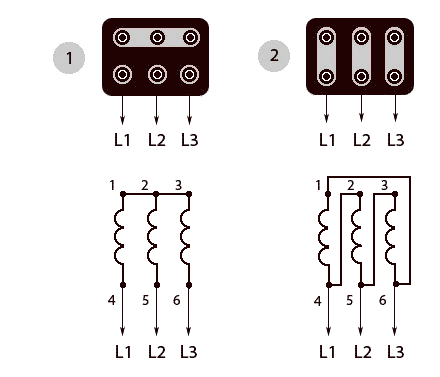
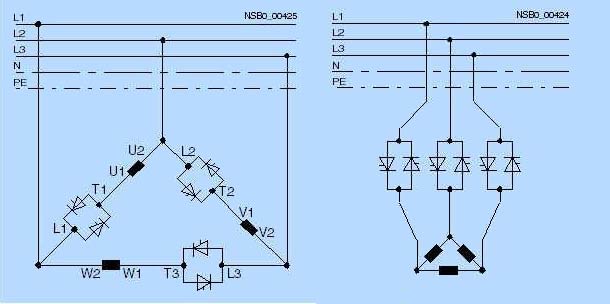
Svorkovnice elektromotorů a schémata zapojení vinutí:
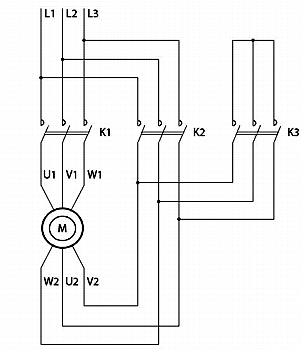
Schéma zapojení motoru (čerpadla) hvězda-trojúhelník.
Aniž bychom zacházeli do technických a podrobných teoretických základů elektrotechniky, je třeba říci, že elektromotory s vinutím zapojeným do hvězdy pracují hladší a měkčí než elektromotory s vinutím zapojeným do trojúhelníku, je třeba poznamenat, že když jsou vinutí spojena hvězda, elektromotor nemůže vyvinout plný výkon. Při zapojení vinutí podle zapojení do trojúhelníku elektromotor pracuje na plný jmenovitý výkon (což je 1,5krát větší výkon než při zapojení do hvězdy), ale zároveň má velmi vysoké rozběhové proudy.
V tomto ohledu je vhodné (zejména u elektromotorů s vyšším výkonem) zapojit podle obvodu hvězda-trojúhelník; Zpočátku se spouštění provádí podle hvězdicového obvodu, po kterém (když elektromotor „nabral rychlost“) dojde k automatickému přepínání podle trojúhelníkového obvodu.
Ovládací obvod: 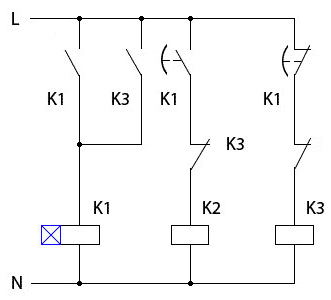
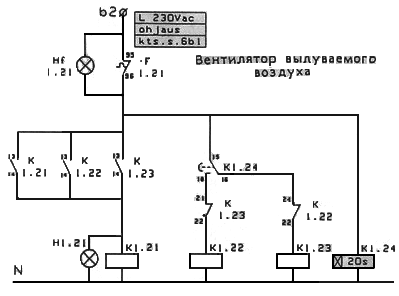
Další verze řídicího obvodu motoru
Připojení napájecího napětí přes rozpínací (normálně sepnutý) kontakt časového relé K1 a rozpínací kontakt K2 v obvodu cívky spouštěče K3.
Po zapnutí startéru K3 svými rozpínacími kontakty rozepne obvody cívky startéru K2 s kontakty K3 (blokování náhodného sepnutí) a sepne kontakt K3 v silovém obvodu cívky magnetického startéru K1, který je v kombinaci s kontakty časového relé.
Při zapnutí spouštěče K1 se sepnou kontakty K1 v obvodu cívky magnetického spouštěče K1 a současně sepne časové relé, otevře se kontakt časového relé K1 v obvodu cívky spouštěče K3 a sepne kontakt časového relé K1 v obvodu cívky spouštěče K2.
Vypnutím vinutí spouštěče K3 se sepne kontakt K3 v obvodu cívky magnetického spouštěče K2. Po zapnutí startéru K2 otevře své kontakty K2 v obvodu silové cívky startéru K3.
Třífázové napětí je přiváděno na začátek vinutí U1, V1 a W1 přes silové kontakty magnetického spouštěče K1. Když je magnetický spouštěč K3 spuštěn pomocí jeho kontaktů K3, dojde ke zkratu, spojující konce vinutí U2, V2 a W2 k sobě navzájem.
Po nějaké době se aktivuje časové relé v kombinaci se startérem K1, vypne startér K3 a současně zapne K2, sepnou se silové kontakty K2 a napětí je přivedeno na konce vinutí motoru U2, V2 a W2. Elektromotor se tak zapíná v trojúhelníkovém vzoru.
Pro spouštění motorů pomocí obvodu hvězda-trojúhelník vyrábějí různí výrobci takzvaná spouštěcí relé, která mohou mít různá jména: „Startovací relé“, „start-trojúhelník“ atd., ale jejich účel je stejný:
RVP-1-15, VL-32M, VL-163, CRM-2T ELKO Česká republika.

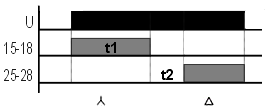
Schéma činnosti spouštěcího relé.
Po přivedení napájecího napětí na relé se začne počítat čas zrychlení t1 a přes kontakty spouštěcího relé 15-18 se zapne spouštěč do hvězdy (vinutí motoru jsou zapojena do hvězdy). Na konci doby zrychlení t1 se kontakty 15-18 rozepnou, hvězdicový spouštěč se vypne a po době pauzy t2 se sepnou kontakty 25-28 vestavěného elektromagnetického relé, čímž se zapne trojúhelníkový spouštěč (vinutí motoru jsou zapojeny do trojúhelníkového obvodu).
Časy T1, T2 se nastavují ovládacími prvky relé, čas pauzy T2 má pevnou hodnotu, obvykle 20,30,40,80 ms, spíná se diskrétně.
TOTAL-všeobecně:
Pro snížení startovacích proudů je nutné nastartovat motor v následujícím pořadí: nejprve zapnout do hvězdicového okruhu při nízkých otáčkách, poté přepnout do trojúhelníku.
První spuštění s trojúhelníkem vytvoří maximální točivý moment a poté přepnutí do hvězdy (startovací moment je 2krát menší) s dalším provozem ve jmenovitém režimu, když elektromotor „nabral otáčky“), dojde k automatickému přepnutí na trojúhelník, stojí za to vzít v úvahu zatížení hřídele před spuštěním, Koneckonců, točivý moment na hvězdě je oslaben, takže tato metoda spouštění pravděpodobně nebude vhodná pro velmi zatížené motory a může selhat.
Co nakonec dává motoru zapojení do hvězdy nebo trojúhelníku? Při zapojení do hvězdy se rozběhový proud elektromotoru sníží 1,73·1,73 = 3x.
Měkký start při použití softstartéru
Pro nahrazení tradičních spínacích obvodů pro snížení startovacího proudu se rozšířila takzvaná softstartérová zařízení – softstartéry.
Jaký je rozdíl a výhoda UPP?

Třífázová střídavá elektrická síť je nejrozšířenější mezi systémy přenosu elektrické energie. Hlavní výhodou třífázového systému oproti jednofázovým a dvoufázovým systémům je jeho hospodárnost. V třífázovém obvodu je energie přenášena třemi vodiči a proudy tekoucí v různých vodičích jsou vzájemně fázově posunuty o 120°, zatímco sinusové EMF v různých fázích mají stejnou frekvenci a amplitudu.

Třífázový proud (fázový rozdíl 120°)
Hvězda a trojúhelník
Třífázové statorové vinutí elektromotoru je zapojeno do hvězdy nebo trojúhelníku v závislosti na napájecím napětí sítě. Konce třífázového vinutí mohou být: zapojeny uvnitř elektromotoru (z motoru vycházejí tři vodiče), vyvedeny (vychází šest vodičů), přivedeny do rozvodné skříně (z krabice vychází šest vodičů, tři dráty vyjdou z krabice).
Fázové napětí – potenciální rozdíl mezi začátkem a koncem jedné fáze. Další definice: fázové napětí je potenciální rozdíl mezi linkovým vodičem a nulovým vodičem.
Síťové napětí – potenciální rozdíl mezi dvěma lineárními vodiči (mezi fázemi).
| Hvězda | Trojúhelník | Označení |
|---|---|---|
 |  | Uл, NEBOф — lineární a fázové napětí, В |
 |  | Iл, Iф — lineární a fázový proud, А |
 |  | S – plný výkon, Út. |
 | | P – činný výkon, Út. |
Poznámka: Ačkoli se výkon pro zapojení do hvězdy a trojúhelníku vypočítává pomocí stejného vzorce, připojení stejného elektromotoru různými způsoby ke stejné elektrické síti bude mít za následek rozdílnou spotřebu energie. V tomto případě může nesprávné připojení elektromotoru vést k roztavení vinutí statoru.
Příklad: Řekněme, že elektromotor byl zapojen v hvězdicové konfiguraci do třífázové sítě střídavého proudu Uл= 380 V (respektive Uф=220 V) a spotřebovaný proud Iл=1 A. Celková spotřeba energie:
S = 1,73∙380∙1 = 658 W.
Nyní změňme schéma zapojení na „trojúhelník“, lineární napětí zůstane stejné Uл= 380 V a fázové napětí se zvýší o odmocninu 3krát Uф=Uл=380 V. Zvýšení fázového napětí povede ke zvýšení fázového proudu o odmocninu 3krát. Lineární proud trojúhelníkového obvodu bude tedy třikrát větší než lineární proud hvězdicového obvodu. Spotřeba energie bude tedy 3x větší:
S = 1,73∙380∙3 = 1975 W.
Pokud je tedy motor navržen pro připojení k třífázové síti střídavého proudu do hvězdy, zapojení tohoto elektromotoru do trojúhelníkové konfigurace může vést k jeho poruše.
Pokud je v normálním režimu elektromotor zapojen do trojúhelníkového obvodu, pak pro snížení startovacích proudů při spouštění může být zapojen do hvězdicového obvodu. V tomto případě se spolu s rozběhovým proudem sníží i rozběhový moment.

Zapojení elektromotoru do hvězdy a trojúhelníku
Označení vývodů statoru třífázového elektromotoru
Označení svorek vinutí statoru nově vyvinuté třífázové stroje podle GOST 26772-85
| Schéma zapojení vinutí, název fáze a výstupu | Označení kolíku | |
|---|---|---|
| začátek | Konec | |
| Otevřený obvod (počet kolíků 6) | ||
| první fáze | U1 | U2 |
| druhá fáze | V1 | V2 |
| třetí fáze | W1 | W2 |
| Hvězdicové zapojení (počet kolíků 3 nebo 4) | ||
| první fáze | U | |
| druhá fáze | V | |
| třetí fáze | W | |
| hvězdný bod (nulový bod) | N | |
| Delta připojení (počet kolíků 3) | ||
| první závěr | U | |
| druhý závěr | V | |
| třetí závěr | W | |
Označení svorek vinutí statoru dříve vyvinuté a modernizované třífázové stroje dle GOST 26772-85
| Schéma zapojení vinutí, název fáze a výstupu | Označení kolíku | |
|---|---|---|
| začátek | Konec | |
| Otevřený obvod (počet kolíků 6) | ||
| první fáze | C1 | C4 |
| druhá fáze | C2 | C5 |
| třetí fáze | C3 | C6 |
| Hvězdicové zapojení (počet kolíků 3 nebo 4) | ||
| první fáze | C1 | |
| druhá fáze | C2 | |
| třetí fáze | C3 | |
| nulový bod | ||
| Delta připojení (počet kolíků 3) | ||
| první závěr | C1 | |
| druhý závěr | C2 | |
| třetí závěr | C3 | |
Připojení třífázového asynchronního motoru k jednofázové síti pomocí prvku s fázovým posunem
Třífázové asynchronní elektromotory lze připojit k jednofázové síti pomocí prvků s fázovým posunem. V tomto případě bude elektromotor pracovat buď v režimu jednofázového motoru se startovacím vinutím (obr. a, b, d) nebo v režimu kondenzátorového motoru s trvale zapnutým pracovním kondenzátorem (obr c, d, f).

Schémata zapojení třífázového asynchronního elektromotoru do jednofázové sítě
Schémata znázorněná na obrázku “a”, “b”, “d” se používají, když je vyvedeno všech šest konců vinutí. Elektromotory se zapojením vinutí podle schémat “a”, “b”, “d” jsou prakticky ekvivalentní motorům, které jsou konstruovány jako jednofázové elektromotory se startovacím vinutím. Jmenovitý výkon je 40-50% výkonu v třífázovém režimu a při práci s pracovním kondenzátorem je to 75-80%.
Kapacita pracovního kondenzátoru při proudové frekvenci 50 Hz pro obvody “c”, “d”, “e” přibližně vypočítáno podle vzorců:



- , kde Cotroka – kapacita pracovního kondenzátoru, uF,
- Inom – jmenovitý (fázový) statorový proud třífázového motoru, А,
- U1 – jednofázové síťové napětí, В.
Řízení asynchronního motoru
Přímé připojení k elektrické síti
Použití magnetických spouštěčů umožňuje řídit asynchronní elektromotory přímým připojením motoru k síti střídavého proudu.
Pomocí magnetických startérů můžete implementovat následující obvod:
- nevratný start: start a stop;
- zpětný start: start, stop a zpětný chod.
Použití tepelného relé umožňuje chránit elektromotor před hodnotami proudu mnohem vyššími, než je jmenovitá hodnota.
Nevratný obvod

Nevratné schéma připojení třífázového asynchronního elektromotoru k třífázové síti střídavého proudu přes magnetický startér
L1, L2, L3 — kontakty pro připojení k síti třífázového střídavého proudu, QF1 – automatický spínač, SB1 – tlačítko stop, SB2 – startovací tlačítko, KM1 – magnetický startér, KK1 – tepelné relé, HL1 – signální lampa, M — třífázový asynchronní motor
reverzní okruh

Reverzibilní schéma pro připojení třífázového asynchronního elektromotoru k třífázové síti střídavého proudu přes magnetické spouštěče
L1, L2, L3 — kontakty pro připojení k síti třífázového střídavého proudu, QF1 – automatický spínač, KM1, KM2 – magnetické startéry, KK1 – tepelné relé, Mmm – třífázový asynchronní motor, SB1 – tlačítko stop, SB2 — startovací tlačítko „vpřed“, SB3 — startovací tlačítko „zpět“ (zpět), HL1, HL2 — signální svítilny
Řízení frekvence asynchronního elektromotoru
K regulaci rychlosti otáčení a točivého momentu asynchronního motoru se používá frekvenční měnič. Princip činnosti frekvenčního měniče je založen na změně frekvence a napětí střídavého proudu.

Funkční schéma frekvenčního měniče
- V závislosti na funkčnosti realizují frekvenční měniče s asynchronním elektromotorem následující způsoby řízení:
- skalární ovládání;
- vektorové ovládání.
Skalární ovládání je jednoduchá a levná na implementaci, má však následující nevýhody – pomalou odezvu na změny zátěže a malý regulační rozsah. Skalární řízení se proto obvykle používá v úlohách, kde je zatížení buď konstantní, nebo se mění podle známého zákona (například řízení ventilátoru).

Skalární řízení asynchronního motoru se snímačem otáček
Vektorové ovládání používá se v úlohách, kde je nutné samostatně řídit otáčky a kroutící moment elektromotoru (například výtahu), což zejména umožňuje udržovat konstantní rychlost otáčení s měnícím se zatěžovacím momentem. Vektorové řízení je přitom nejúčinnějším řízením z hlediska účinnosti a zvýšení provozní doby elektromotoru.
Mezi metodami vektorového řízení pro asynchronní elektromotory jsou nejpoužívanější řízení orientované polem a přímé řízení momentu.

Polně orientované řízení asynchronního elektromotoru pomocí snímače polohy rotoru
Řízení orientované na pole umožňuje plynule a přesně řídit parametry pohybu (rychlost a točivý moment), ale jeho realizace vyžaduje informaci o směru a vektoru vazby toku rotoru motoru.
- Podle způsobu získávání informací o poloze táhla toku rotoru elektromotoru se rozlišují:
- řízení senzorů orientované na pole;
- řízení orientované na pole bez senzoru: poloha vazby rotorového toku se vypočítá matematicky na základě informací dostupných ve frekvenčním měniči (napájecí napětí, statorová napětí a proudy, odpor a indukčnost vinutí statoru a rotoru, počet pólů motoru páry).

Polně orientované řízení asynchronního elektromotoru bez snímače polohy rotoru
Přímé řízení točivého momentu Má jednoduchý obvod a vysokou provozní dynamiku, ale zároveň velké zvlnění točivého momentu a proudu.